


Intelligent World Drive
Des voitures à la fois intelligentes et sûres, qui se déplacent de façon autonome à travers la circulation : tel est l’objectif de la conduite autonome. Mais qu’est-il vraiment possible de réaliser avec les technologies actuelles ? C’est à cette question qu’a voulu répondre une équipe de Mercedes-Benz, en 5 étapes et sur 5 continents. De septembre 2017 à janvier dernier, l’équipe a pris la route. Quand Jochen Haab, le responsable de l’équipe, évoque aujourd’hui cette aventure, son enthousiasme est total. Il s’étonne, avec ses collègues, de l’étendue des tâches qu’une Classe S, produite en série, est déjà capable d’assurer de façon autonome grâce aux systèmes d’assistance embarqués. Mais l’équipe a aussi compris qu’il reste beaucoup à faire…

« L’idée de l’Intelligent World Drive était de mettre la voiture dans des situations typiques et de gagner ainsi en expérience pratique », explique Jochen Haab. « Nous allons pouvoir maintenant faire évoluer nos systèmes à partir des données collectées. » L’équipe est partie de Francfort, lors du Salon international de l’automobile, direction les États-Unis via Shanghai, l’Australie et l’Afrique du Sud. Jochen Haab raconte les défis que la Classe S a dû relever à chaque étape.
Allemagne
Il y a d’énormes différences de vitesses sur l’autoroute. On peut par exemple dépasser un poids-lourd en roulant à 130 km/h et avoir une voiture qui arrive derrière à plus de 200 km/h ! Le radar embarqué de la Classe S possède une portée de 80 mètres vers l’avant et de 250 mètres vers l’arrière. La caméra stéréo couvre un périmètre de 500 mètres vers l’avant, dont 90 mètres en 3D. Est-ce suffisant ? Combien de temps reste-t-il au système pour réagir une fois qu’il a enregistré la voiture qui approche ? Comment réagirait-il pour éviter un accident ? La demande des clients aujourd’hui est claire : ils veulent un véhicule qui réagit de façon rigoureuse, mais seulement si cela est réellement nécessaire.


Chine
Une circulation très dense, de nombreux deux-roues, des sortes de passages piétons sur l’autoroute (en réalité des signes pour visualiser les distances de sécurité), des limitations de vitesse différentes selon les voies : voilà quelques caractéristiques de la circulation en Chine. En traversant Shanghai, nous avons réalisé que des cartes routières avec des informations plus précises sur les différentes voies sont nécessaires. Lorsque plusieurs autoroutes se croisent, la voiture ne sait plus où elle se trouve. Souvent, les marquages au sol détectables par les caméras sont totalement absents. Or, en l’absence de points de repère, la voiture ne peut pas déterminer sa position. Dans ce genre de situation, elle a tendance à continuer tout droit. Autre élément à prendre en compte : en Chine, on attend d’une voiture autonome qu’elle prenne les virages comme le font les Chinois, c’est à dire en freinant dans le virage et en accélérant à la sortie. Les Européens se remettent à accélérer alors qu’ils n’ont pas encore quitté le virage. Ces différences culturelles sont déterminantes pour le développement de la conduite autonome.
Australie
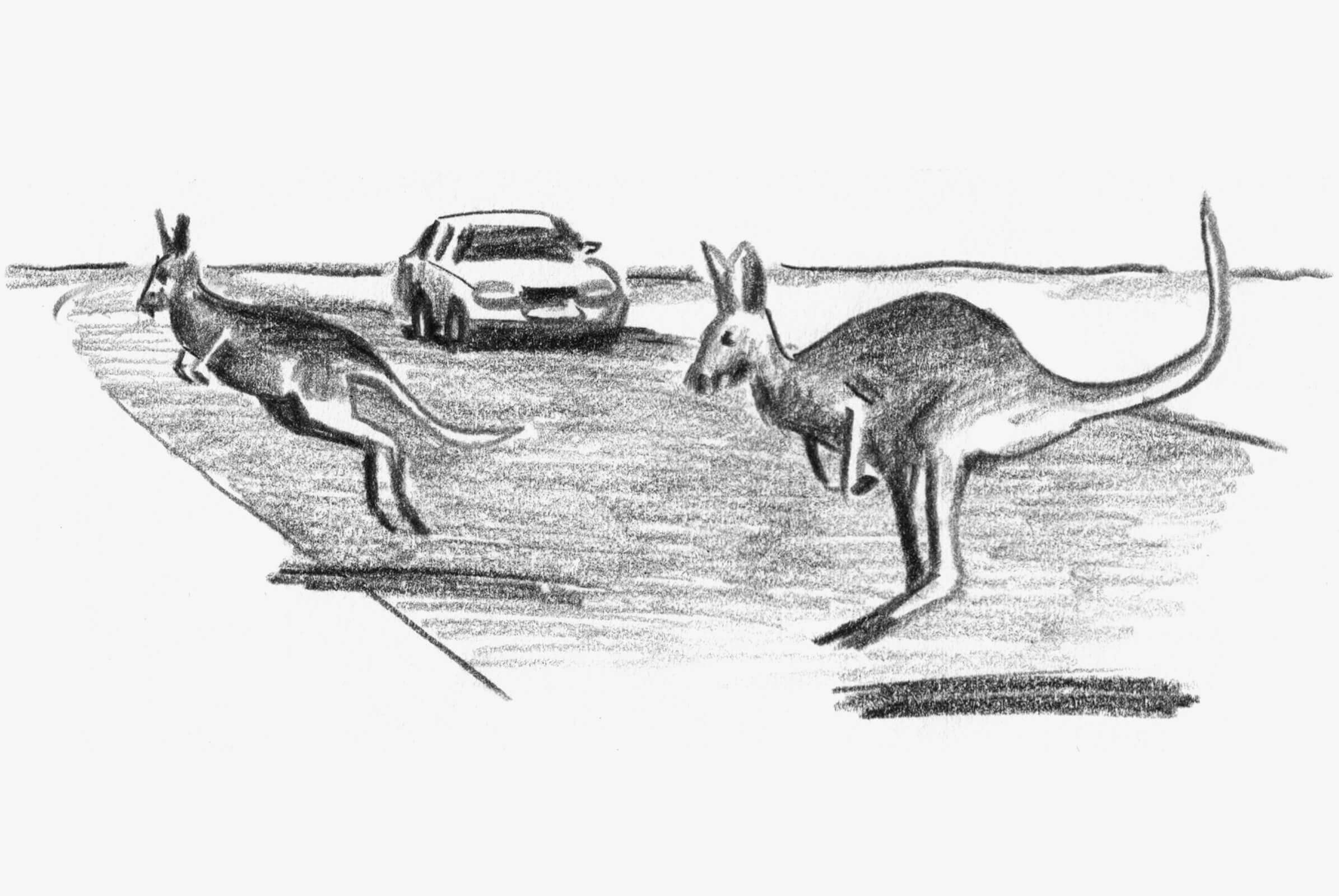
Des limitations de vitesse qui clignotent sur des affichages électroniques. Des trains routiers qui traversent le désert. Des kangourous qui franchissent la route en quelques bonds. Et, pour couronner le tout, la règle du hook turn, qui impose de se mettre sur la voie de gauche lorsque l’on veut tourner à droite (pour ne pas gêner la circulation du tramway) et d’attendre que le feu passe au vert dans la voie que l’on veut emprunter. À Melbourne, les conducteurs doivent avoir les nerfs solides… et pour la voiture autonome, c’est un défi d’une grande complexité.
Même les habitants de Melbourne sont nombreux à éviter les hook turns, préférant tourner trois fois à gauche ! Les anneaux en LED rouge clignotants qui indiquent les limitations de vitesse sont correctement traités par le cerveau humain, mais les systèmes du véhicule sont encore un peu dépassés par cette tâche. Tout aussi délicat : comment faire en sorte que le véhicule évite efficacement les animaux sans mettre les passagers en danger ? Il faut détecter suffisamment tôt les dimensions de l’objet et articuler immédiatement une stratégie adaptée à la situation pour éviter l’accident…
Afrique du Sud
La circulation en Afrique du Sud est assez confuse. Il y a des piétons même sur les voies rapides et les manœuvres surprenantes de certains véhicules font partie du quotidien… Au Cap, lors d’un essai à 100 km/h, la Classe S a dû gérer un cycliste arrivant en face dans un accotement de quelques centimètres seulement. Autre mésaventure : sur une route serpentant au sud de la ville, le vent avait fait disparaître le bitume sous une fine couche de sable et les caméras ne parvenaient plus à détecter la route. Le véhicule a malgré tout réussi à parcourir cette route le long de la côte presque tout seul !

États-Unis
Sur les voies rapides et les autoroutes aux États-Unis, la conduite est plutôt tranquille. On peut se laisser porter par le flux du trafic et les vitesses ne varient pas beaucoup. Toutefois, les huit voies parallèles sur les autoroutes fournissent de nombreuses informations qu’il faut traiter en même temps, sachant que l’on peut doubler aussi bien à droite qu’à gauche. Malgré cela, les États-Unis seront certainement parmi les premiers à passer à l’étape suivante de la conduite autonome. Les Américains, comme les conducteurs du monde entier, sont aussi critiques qu’enthousiastes vis-à-vis de la conduite autonome. Ce voyage avait aussi pour but de recueillir les appréhensions et les questions des futurs utilisateurs.